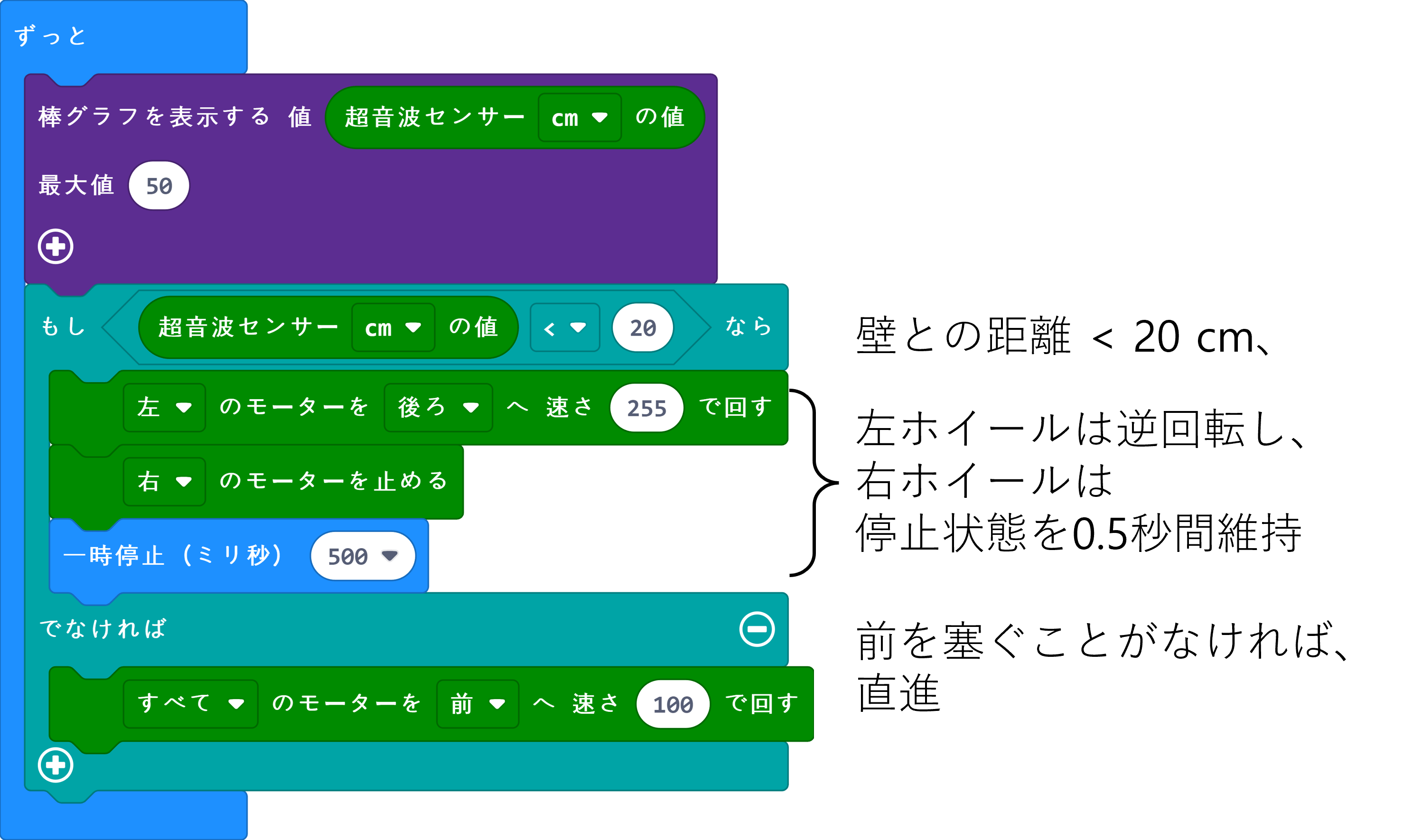
回避起動(距離センサ使用)
Maqueenが進行中に壁や障害物に遭遇した場合、回避します(< 20 cm)。
ソースコード
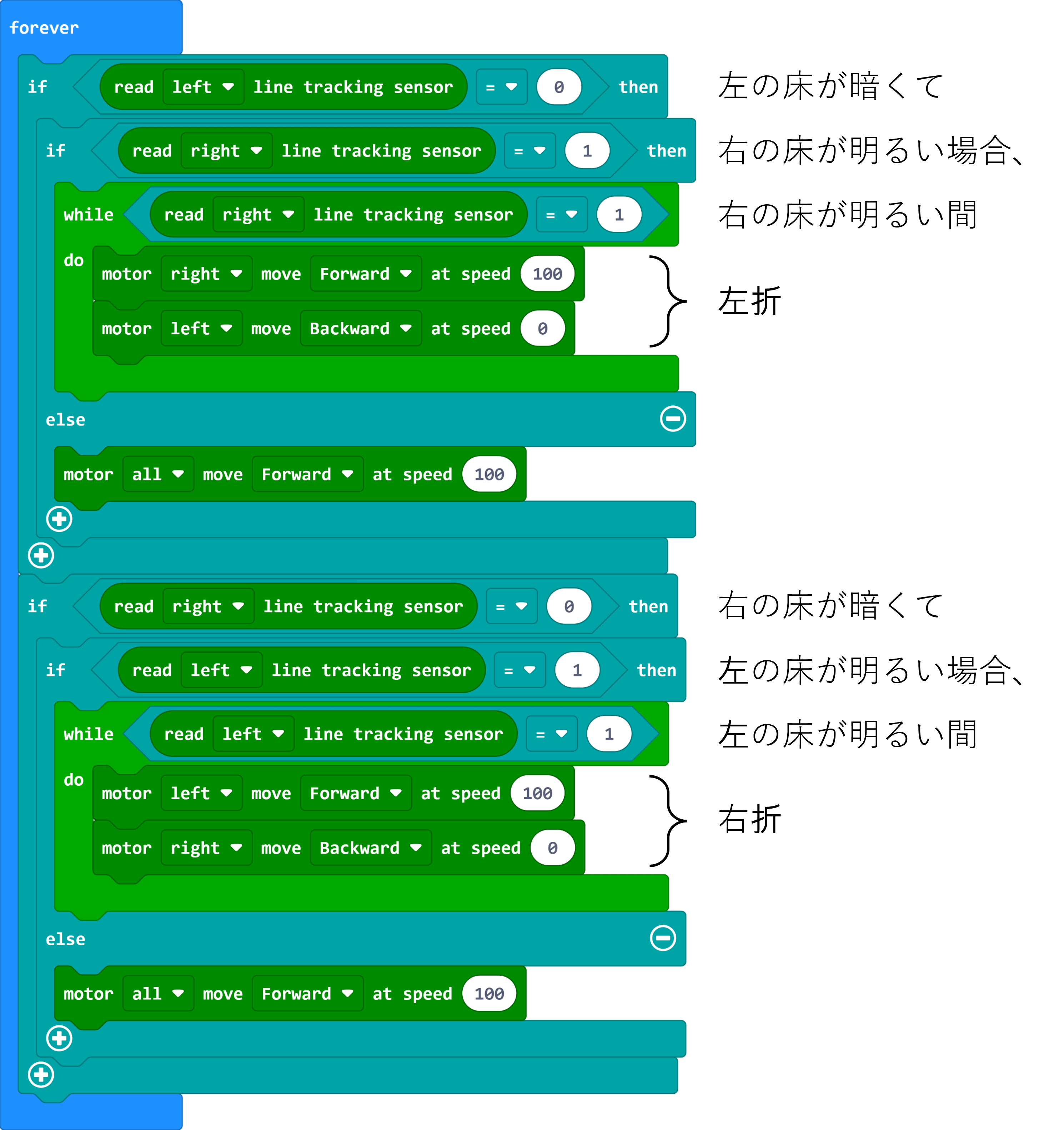
床の線をたどる
床の線をたどる ソースコード
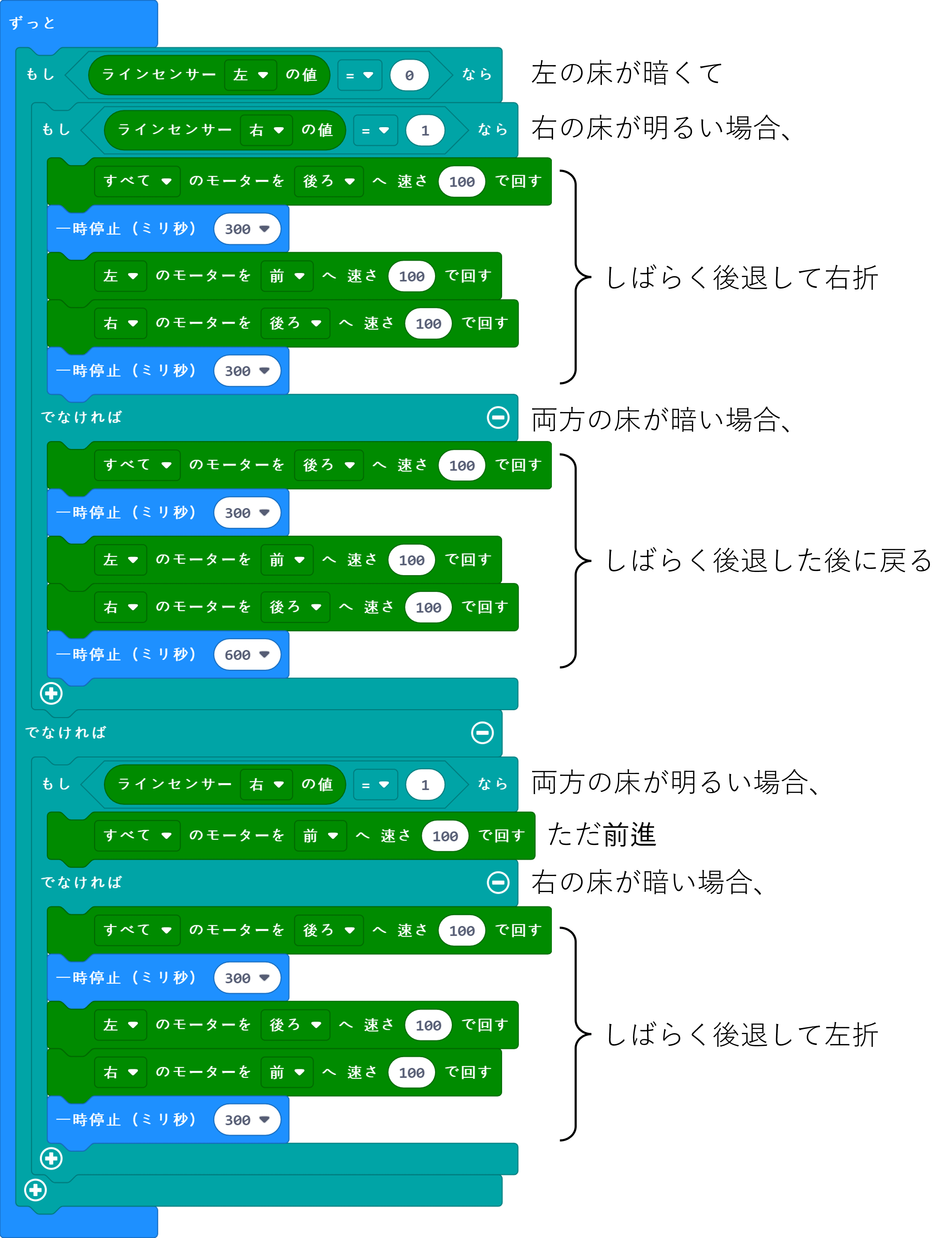
黒い結界
黒い結界 – ソースコード
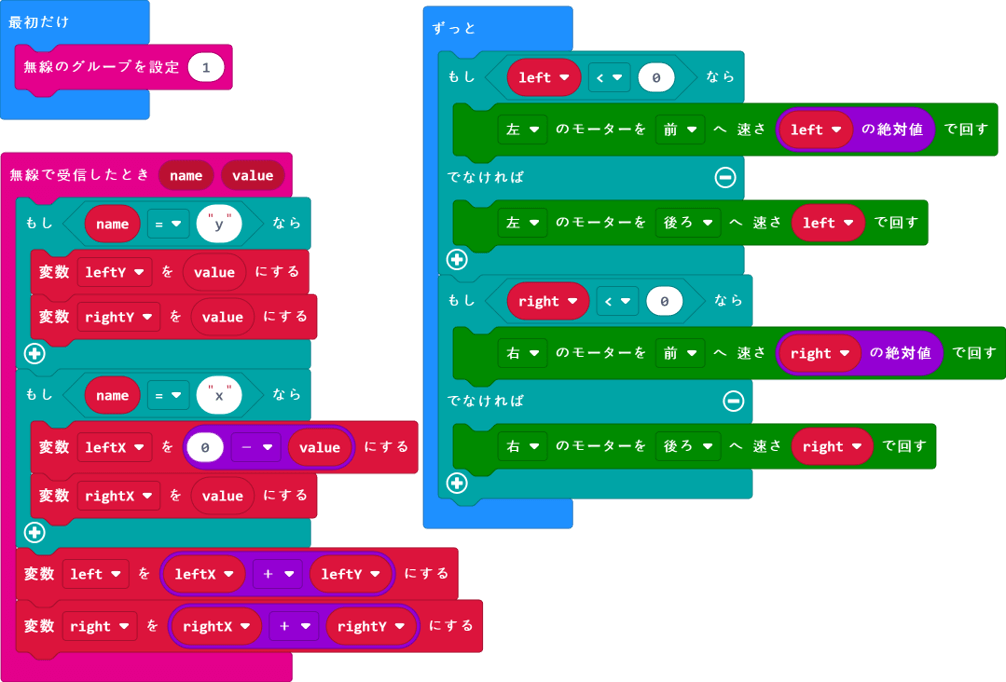
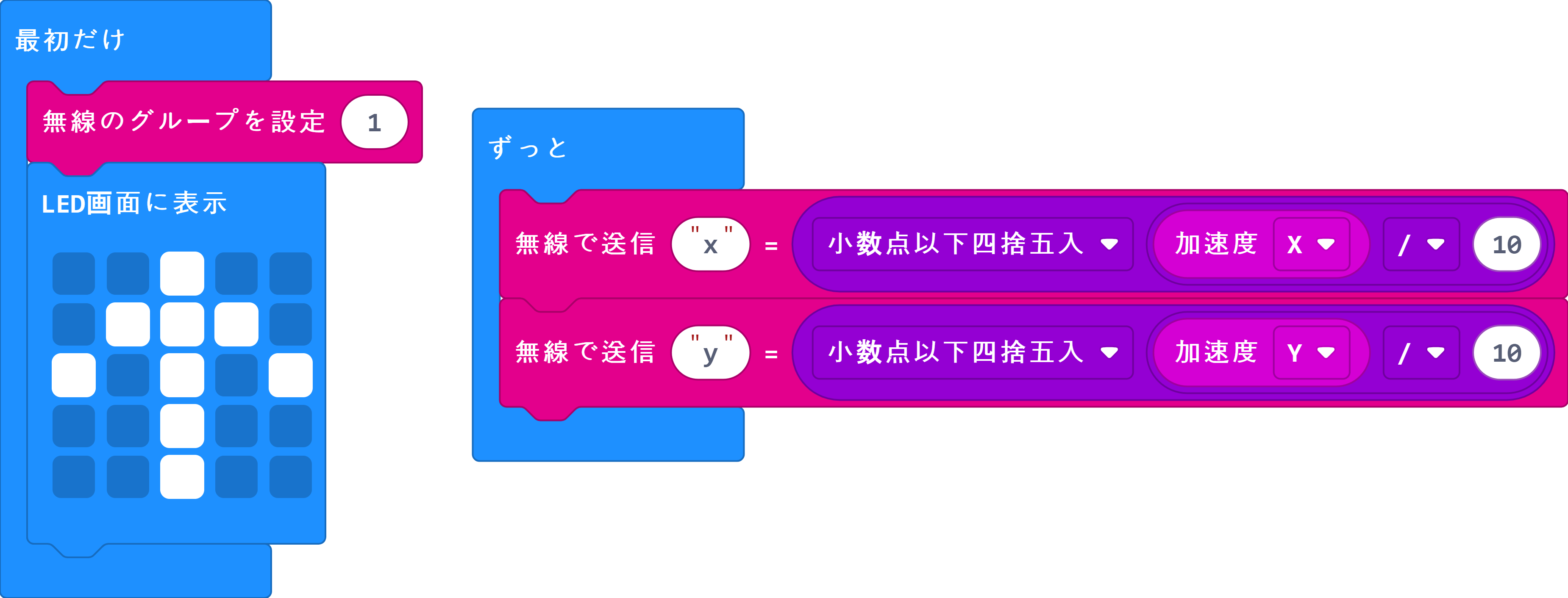
ワイヤレスコントロール
ワイヤレスコントロール – 送信部(リモコン) ソースコード
送信部(リモコン)と受信部(ロボット)は、無線グループが一致している必要があります。
複数の人が同時にコーディングする場合、混乱を防ぐために他の人が使用しないグループを使用してください。
ワイヤレスコントロール – 受信部(ロボット) ソースコード
送信部(リモコン)と受信部(ロボット)は、無線グループが一致している必要があります。
複数の人が同時にコーディングする場合、混乱を防ぐために他の人が使用しないグループを使用してください。